Ziel des Projekts war es eine möglichst einfache Töpferscheibe zu bauen, die genug Kraft und eine große Scheibe hat. Das Projekt entsand als Geschenkidee und sollte möglichst mit „Resten“ auskommen. Viel Spaß beim Lesen und nachbauen!
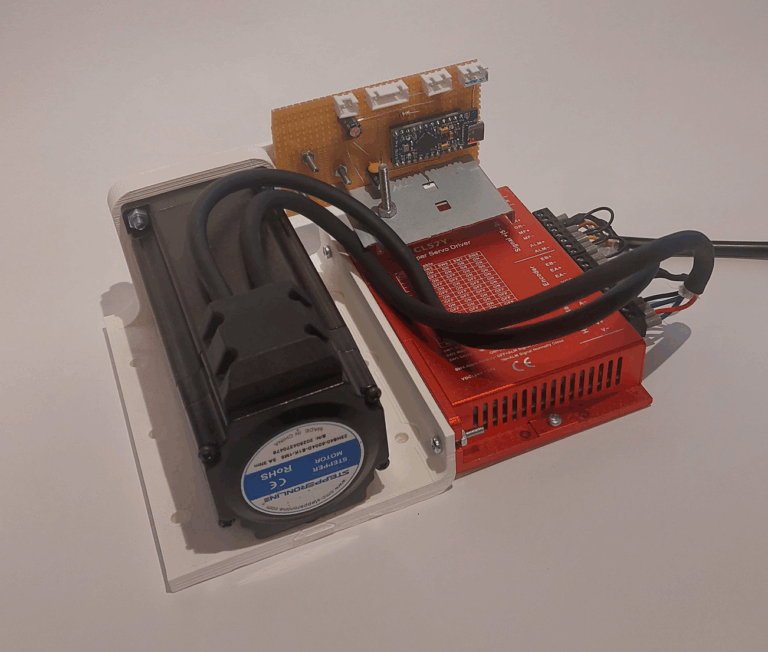
Zuerst baute ich den Antrieb der Töpferscheibe mit einem Bürstenmotor und einigen Zahnrädern. Es stellte sich leider heraus, dass die Zahnräder zu laut und der Bürstenmotor zu schwach waren. Also entschloss ich mich einen Steppermotor, den ich vom Bau der CNC-Fräse über hatte in die Töpferscheibe einzubauen. Natürlich brauchte es dann noch einen Arduino zur Ansteuerung, welcher sich ideal eignete die Töpferscheibe um ein Fußpedal zu erweitern, um die Geschwindigkeit zu variieren.
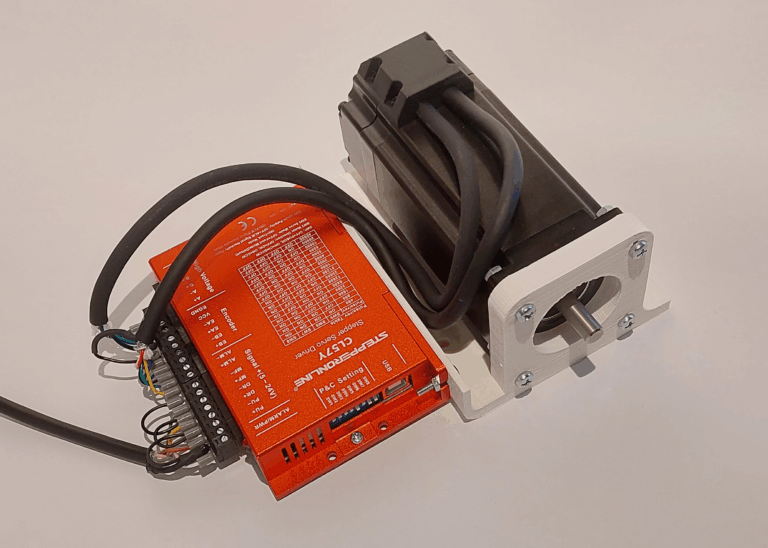
Als Motor habe ich ein 3 Nm Closed loop NEMA 23 Motor verwendet. Da ich nur ein 24 V Netzteil übrig hatte wird er diese Kraft nicht ganz erreichen aber es sollte ausreichen, um gut töpfern zu können. Ich gebe zu, dass auch ein normaler Steppermotor für diese Anwendung gereicht hätte, allerdings schadet die Abschaltung durch den CL57Y sicherlich nicht: Hängt der Motor zu viele Schritte zurück, stellt die Steuerung den Motor stromlos.
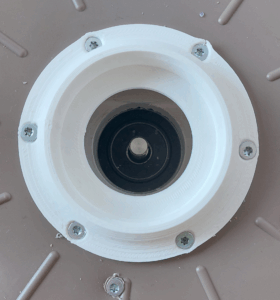
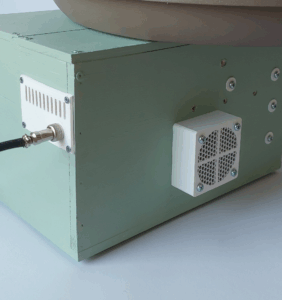
Der Motor wurde mit Abstandshaltern und O-Ringen zur Vibrationsabschirmung im Gehäuse angeschraubt.
Damit man die Geschwindigkeit wären des Töpferns verändern kann braucht es ein Fußpedal. Dazu habe ich den Spannungsabfall über ein 160 Ohm Potentiometer mit dem Arduino gemessen. Im Pedal findet sich ein kleines Kugellager zu Lastübertragung und eine Feder, die das Pedal zurücl in die Nullstellung zieht.
Um die Interferenz möglichst klein zu halten ist das Fußpedal mit einem geschirmten Kabel und einem GX12 Connector am Arduino angeschlossen.
Der Code, welcher die Stepsignale an den Steppermotordriver kontrolliert, ist recht simpel gestaltet. Alle 50 ms wird die Spannung zwischen einem Referenzwiderstand und dem Fußpedal ausgelesen und in den letzten Platz eines Arrays eingetragen. Bei erneutem Auslesen werden alle Werte im Array verschoben und der neue Wert eingetragen. Aus dem Mittelwert des Arrays wird die Wartezeit zwischen Stepimpulsen berechnet.
Das Gute an diesem Mittelwertansatz ist, dass die Beschleunigung des Steppermotors über die Länge des Arrays bzw. über die Zeit zwischen Messungen eingestellt werden kann. Außerdem wird jeder einzelne Messpunkt bei einem langen Array weniger relevant und evenuelle Interferenzen werden ausgeglichen.
Die Geschwindigkeit wurde hier auf fünf Umdrehungen pro Sekunde begrenzt, kann aber frei angepasst werden.